I have a problem with V-USB library. I have wrote the example code on my evaluating booard with atmega32 and 16MHz crystal. And it works. After upload the code to my board with atmega32 and 12MHz crystal it doasnt work. I have change the #define USB_CFG_CLOCK_KHZ in usbconfig.h. But I didnt get anything on the D+ and D- outputs of microntroller. Also after I add this code the rest of the code on my board doasn't work.
If I comment mouse_init(); line the rest of code works great.
main.h
Code: Select all
/*
* atmega32_HeadSens.c
*
* Created: 2012-09-06 14:12:38
* Author: mati
*/
#define F_CPU 12000000L
#include <avr/io.h>
#include <stdlib.h>
#include <stdio.h>
#include <util/delay.h>
#include <avr/interrupt.h>
#include <avr/wdt.h> //Biblioteka WatchDog
#include "atmega32_HeadSens.h"
#include "atm32_comm/UART_ATM32.h"
#include "atm32_comm/i2cmaster.h"
#include "usbdrv/mouse_lib.h"
// Moje biblioteki
#include "moje_lib/mma7455l.h"
#include "moje_lib/ppm.h"
int send=0;
volatile char rx_data;
ISR(USART_RXC_vect)
{
send=1;
rx_data=UDR;
}
int filtr_medianowy(int *tab, int size)
{
int temp_tab[40];
for(int i=0 ; i<size ; i++)
{
temp_tab[i] = tab[i];
}
int i, j, temp;
for (i = 0; i<size; i++)
{
for (j=0; j<size-1; j++)
{
if (temp_tab[j] > temp_tab[j+1])
{
temp = temp_tab[j+1];
temp_tab[j+1] = temp_tab[j];
temp_tab[j] = temp;
}
}
}
return temp_tab[(size/2)-1];
}
int main(void)
{
//Sens
int pomiar_akc_x[40];
int pomiar_akc_y[40];
int pomiar_akc_z[40];
//Mouse
//uchar button=0;
//char dx=1, dy=1;
DDRB = 0xFF;
PORTB = 0xFF;
DDRC = 0xFF;
PORTC = 0xFF;
DDRD = 0x80;
PORTD = 0x00;
USART_Init();
sprintf(buf,"Start\n");
USART_send_string(buf);
MMA7455L_init();
ppm_send_init();
ppm_receive_init();
mouse_init();
wdt_enable(WDTO_1S); // enable 1s watchdog timer
sei();
while(1)
{
akcelerometr_poss_x = getHeadingMMA_x()+20;
akcelerometr_poss_y = getHeadingMMA_y()+30;
akcelerometr_poss_z = getHeadingMMA_z();
wdt_reset(); // keep the watchdog happy
//usbPoll(); //Keep contact USB happy
//Filtr akcelerometr x
for(int i=0; i<40-1; i++) pomiar_akc_x[i]=pomiar_akc_x[i+1];
pomiar_akc_x[39]=akcelerometr_poss_x;
akcelerometr_poss_x = filtr_medianowy(pomiar_akc_x, 40);
//Filtr akcelerometr Y
for(int i=0; i<40-1; i++) pomiar_akc_y[i]=pomiar_akc_y[i+1];
pomiar_akc_y[39]=akcelerometr_poss_y;
akcelerometr_poss_y = filtr_medianowy(pomiar_akc_y, 40);
//Filtr akcelerometr z
for(int i=0; i<40-1; i++) pomiar_akc_z[i]=pomiar_akc_z[i+1];
pomiar_akc_z[39]=akcelerometr_poss_z;
akcelerometr_poss_z = filtr_medianowy(pomiar_akc_z, 40);
//Set camera position
kanal_sen[0]=kanal_rec[0]/32;
kanal_sen[1]=kanal_rec[1]/32;
kanal_sen[2]=70-(akcelerometr_poss_y/2);
kanal_sen[3]=kanal_rec[3]/32;
kanal_sen[4]=kanal_rec[4]/32;
kanal_sen[5]=kanal_rec[5]/32;
//Send mouse data
/*if(usbInterruptIsReady())
{
send_data_like_mouse(dx, dy, button);
}*/
//Send data from UC USART
if(send && rx_data=='s')
{
sprintf(buf,"x: %i y: %i z: %i rec1: %i rec2: %i rec3: %i rec4: %i rec5: %i rec6: %i\n",akcelerometr_poss_x, akcelerometr_poss_y, akcelerometr_poss_z, kanal_rec[0], kanal_rec[1], kanal_rec[2], kanal_rec[3], kanal_rec[4], kanal_rec[5], kanal_rec[6]);
USART_send_string(buf);
send=0;
rx_data=0;
}
}
}mouse_lib.c
Code: Select all
/*
* mouse_lib.c
*
* Created: 2012-08-26 16:34:59
* Author: mati
*/
#include "mouse_lib.h"
PROGMEM char usbHidReportDescriptor[52] = { /* USB report descriptor, size must match usbconfig.h */
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x02, // USAGE (Mouse)
0xa1, 0x01, // COLLECTION (Application)
0x09, 0x01, // USAGE (Pointer)
0xA1, 0x00, // COLLECTION (Physical)
0x05, 0x09, // USAGE_PAGE (Button)
0x19, 0x01, // USAGE_MINIMUM
0x29, 0x03, // USAGE_MAXIMUM
0x15, 0x00, // LOGICAL_MINIMUM (0)
0x25, 0x01, // LOGICAL_MAXIMUM (1)
0x95, 0x03, // REPORT_COUNT (3)
0x75, 0x01, // REPORT_SIZE (1)
0x81, 0x02, // INPUT (Data,Var,Abs)
0x95, 0x01, // REPORT_COUNT (1)
0x75, 0x05, // REPORT_SIZE (5)
0x81, 0x03, // INPUT (Const,Var,Abs)
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x30, // USAGE (X)
0x09, 0x31, // USAGE (Y)
0x09, 0x38, // USAGE (Wheel)
0x15, 0x81, // LOGICAL_MINIMUM (-127)
0x25, 0x7F, // LOGICAL_MAXIMUM (127)
0x75, 0x08, // REPORT_SIZE (8)
0x95, 0x03, // REPORT_COUNT (3)
0x81, 0x06, // INPUT (Data,Var,Rel)
0xC0, // END_COLLECTION
0xC0, // END COLLECTION
};
void mouse_init()
{
uchar i;
usbInit();
usbDeviceDisconnect(); // enforce re-enumeration
for(i = 0; i<250; i++) { // wait 500 ms
wdt_reset(); // keep the watchdog happy
_delay_ms(2);
}
usbDeviceConnect();
}
/* This is the same report descriptor as seen in a Logitech mouse. The data
* described by this descriptor consists of 4 bytes:
* . . . . . B2 B1 B0 .... one byte with mouse button states
* X7 X6 X5 X4 X3 X2 X1 X0 .... 8 bit signed relative coordinate x
* Y7 Y6 Y5 Y4 Y3 Y2 Y1 Y0 .... 8 bit signed relative coordinate y
* W7 W6 W5 W4 W3 W2 W1 W0 .... 8 bit signed relative coordinate wheel
*/
typedef struct{
uchar buttonMask;
char dx;
char dy;
char dWheel;
} report_t;
static report_t reportBuffer;
static uchar idleRate; /* repeat rate for keyboards, never used for mice */
usbMsgLen_t usbFunctionSetup(uchar data[8]) {
usbRequest_t *rq = (void *)data;
// The following requests are never used. But since they are required by
// the specification, we implement them in this example.
if((rq->bmRequestType & USBRQ_TYPE_MASK) == USBRQ_TYPE_CLASS) {
if(rq->bRequest == USBRQ_HID_GET_REPORT) {
// wValue: ReportType (highbyte), ReportID (lowbyte)
usbMsgPtr = (void *)&reportBuffer; // we only have this one
return sizeof(reportBuffer);
} else if(rq->bRequest == USBRQ_HID_GET_IDLE) {
usbMsgPtr = &idleRate;
return 1;
} else if(rq->bRequest == USBRQ_HID_SET_IDLE) {
idleRate = rq->wValue.bytes[1];
}
}
return 0; // by default don't return any data
}
// Button (0bxxxxxSP,RP,LP)
void send_data_like_mouse(char dx, char dy, uchar button)
{
// move to a random direction
reportBuffer.dx = dx;
reportBuffer.dy = dy;
reportBuffer.buttonMask = button;
usbSetInterrupt((void *)&reportBuffer, sizeof(reportBuffer));
}mouse_lib.h
Code: Select all
/*
* mouse_lib.h
*
* Created: 2012-08-26 16:31:43
* Author: mati
*/
#ifndef MOUSE_LIB_H_
#define MOUSE_LIB_H_
#include "usbdrv.h"
#include <avr/io.h>
#include <avr/interrupt.h>
#include <avr/wdt.h>
#include <util/delay.h>
void mouse_init();
void send_data_like_mouse(char dx, char dy, uchar button);
#endif /* MOUSE_LIB_H_ */usbconfig.h
Code: Select all
/* Name: usbconfig.h
* Project: V-USB, virtual USB port for Atmel's(r) AVR(r) microcontrollers
* Author: Christian Starkjohann
* Creation Date: 2005-04-01
* Tabsize: 4
* Copyright: (c) 2005 by OBJECTIVE DEVELOPMENT Software GmbH
* License: GNU GPL v2 (see License.txt), GNU GPL v3 or proprietary (CommercialLicense.txt)
* This Revision: $Id$
*/
#ifndef __usbconfig_h_included__
#define __usbconfig_h_included__
/*
General Description:
This file is an example configuration (with inline documentation) for the USB
driver. It configures V-USB for USB D+ connected to Port D bit 2 (which is
also hardware interrupt 0 on many devices) and USB D- to Port D bit 4. You may
wire the lines to any other port, as long as D+ is also wired to INT0 (or any
other hardware interrupt, as long as it is the highest level interrupt, see
section at the end of this file).
*/
/* ---------------------------- Hardware Config ---------------------------- */
#define USB_CFG_IOPORTNAME A
/* This is the port where the USB bus is connected. When you configure it to
* "B", the registers PORTB, PINB and DDRB will be used.
*/
#define USB_CFG_DMINUS_BIT 1
/* This is the bit number in USB_CFG_IOPORT where the USB D- line is connected.
* This may be any bit in the port.
*/
#define USB_CFG_DPLUS_BIT 0
/* This is the bit number in USB_CFG_IOPORT where the USB D+ line is connected.
* This may be any bit in the port. Please note that D+ must also be connected
* to interrupt pin INT0! [You can also use other interrupts, see section
* "Optional MCU Description" below, or you can connect D- to the interrupt, as
* it is required if you use the USB_COUNT_SOF feature. If you use D- for the
* interrupt, the USB interrupt will also be triggered at Start-Of-Frame
* markers every millisecond.]
*/
#define USB_CFG_CLOCK_KHZ (F_CPU/1000)
/* Clock rate of the AVR in kHz. Legal values are 12000, 12800, 15000, 16000,
* 16500, 18000 and 20000. The 12.8 MHz and 16.5 MHz versions of the code
* require no crystal, they tolerate +/- 1% deviation from the nominal
* frequency. All other rates require a precision of 2000 ppm and thus a
* crystal!
* Since F_CPU should be defined to your actual clock rate anyway, you should
* not need to modify this setting.
*/
#define USB_CFG_CHECK_CRC 0
/* Define this to 1 if you want that the driver checks integrity of incoming
* data packets (CRC checks). CRC checks cost quite a bit of code size and are
* currently only available for 18 MHz crystal clock. You must choose
* USB_CFG_CLOCK_KHZ = 18000 if you enable this option.
*/
/* ----------------------- Optional Hardware Config ------------------------ */
/* #define USB_CFG_PULLUP_IOPORTNAME D */
/* If you connect the 1.5k pullup resistor from D- to a port pin instead of
* V+, you can connect and disconnect the device from firmware by calling
* the macros usbDeviceConnect() and usbDeviceDisconnect() (see usbdrv.h).
* This constant defines the port on which the pullup resistor is connected.
*/
/* #define USB_CFG_PULLUP_BIT 4 */
/* This constant defines the bit number in USB_CFG_PULLUP_IOPORT (defined
* above) where the 1.5k pullup resistor is connected. See description
* above for details.
*/
/* --------------------------- Functional Range ---------------------------- */
#define USB_CFG_HAVE_INTRIN_ENDPOINT 1
/* Define this to 1 if you want to compile a version with two endpoints: The
* default control endpoint 0 and an interrupt-in endpoint (any other endpoint
* number).
*/
#define USB_CFG_HAVE_INTRIN_ENDPOINT3 0
/* Define this to 1 if you want to compile a version with three endpoints: The
* default control endpoint 0, an interrupt-in endpoint 3 (or the number
* configured below) and a catch-all default interrupt-in endpoint as above.
* You must also define USB_CFG_HAVE_INTRIN_ENDPOINT to 1 for this feature.
*/
#define USB_CFG_EP3_NUMBER 3
/* If the so-called endpoint 3 is used, it can now be configured to any other
* endpoint number (except 0) with this macro. Default if undefined is 3.
*/
/* #define USB_INITIAL_DATATOKEN USBPID_DATA1 */
/* The above macro defines the startup condition for data toggling on the
* interrupt/bulk endpoints 1 and 3. Defaults to USBPID_DATA1.
* Since the token is toggled BEFORE sending any data, the first packet is
* sent with the oposite value of this configuration!
*/
#define USB_CFG_IMPLEMENT_HALT 0
/* Define this to 1 if you also want to implement the ENDPOINT_HALT feature
* for endpoint 1 (interrupt endpoint). Although you may not need this feature,
* it is required by the standard. We have made it a config option because it
* bloats the code considerably.
*/
#define USB_CFG_SUPPRESS_INTR_CODE 0
/* Define this to 1 if you want to declare interrupt-in endpoints, but don't
* want to send any data over them. If this macro is defined to 1, functions
* usbSetInterrupt() and usbSetInterrupt3() are omitted. This is useful if
* you need the interrupt-in endpoints in order to comply to an interface
* (e.g. HID), but never want to send any data. This option saves a couple
* of bytes in flash memory and the transmit buffers in RAM.
*/
#define USB_CFG_INTR_POLL_INTERVAL 100
/* If you compile a version with endpoint 1 (interrupt-in), this is the poll
* interval. The value is in milliseconds and must not be less than 10 ms for
* low speed devices.
*/
#define USB_CFG_IS_SELF_POWERED 0
/* Define this to 1 if the device has its own power supply. Set it to 0 if the
* device is powered from the USB bus.
*/
#define USB_CFG_MAX_BUS_POWER 200
/* Set this variable to the maximum USB bus power consumption of your device.
* The value is in milliamperes. [It will be divided by two since USB
* communicates power requirements in units of 2 mA.]
*/
#define USB_CFG_IMPLEMENT_FN_WRITE 0
/* Set this to 1 if you want usbFunctionWrite() to be called for control-out
* transfers. Set it to 0 if you don't need it and want to save a couple of
* bytes.
*/
#define USB_CFG_IMPLEMENT_FN_READ 0
/* Set this to 1 if you need to send control replies which are generated
* "on the fly" when usbFunctionRead() is called. If you only want to send
* data from a static buffer, set it to 0 and return the data from
* usbFunctionSetup(). This saves a couple of bytes.
*/
#define USB_CFG_IMPLEMENT_FN_WRITEOUT 0
/* Define this to 1 if you want to use interrupt-out (or bulk out) endpoints.
* You must implement the function usbFunctionWriteOut() which receives all
* interrupt/bulk data sent to any endpoint other than 0. The endpoint number
* can be found in 'usbRxToken'.
*/
#define USB_CFG_HAVE_FLOWCONTROL 0
/* Define this to 1 if you want flowcontrol over USB data. See the definition
* of the macros usbDisableAllRequests() and usbEnableAllRequests() in
* usbdrv.h.
*/
#define USB_CFG_DRIVER_FLASH_PAGE 0
/* If the device has more than 64 kBytes of flash, define this to the 64 k page
* where the driver's constants (descriptors) are located. Or in other words:
* Define this to 1 for boot loaders on the ATMega128.
*/
#define USB_CFG_LONG_TRANSFERS 0
/* Define this to 1 if you want to send/receive blocks of more than 254 bytes
* in a single control-in or control-out transfer. Note that the capability
* for long transfers increases the driver size.
*/
/* #define USB_RX_USER_HOOK(data, len) if(usbRxToken == (uchar)USBPID_SETUP) blinkLED(); */
/* This macro is a hook if you want to do unconventional things. If it is
* defined, it's inserted at the beginning of received message processing.
* If you eat the received message and don't want default processing to
* proceed, do a return after doing your things. One possible application
* (besides debugging) is to flash a status LED on each packet.
*/
/* #define USB_RESET_HOOK(resetStarts) if(!resetStarts){hadUsbReset();} */
/* This macro is a hook if you need to know when an USB RESET occurs. It has
* one parameter which distinguishes between the start of RESET state and its
* end.
*/
/* #define USB_SET_ADDRESS_HOOK() hadAddressAssigned(); */
/* This macro (if defined) is executed when a USB SET_ADDRESS request was
* received.
*/
#define USB_COUNT_SOF 0
/* define this macro to 1 if you need the global variable "usbSofCount" which
* counts SOF packets. This feature requires that the hardware interrupt is
* connected to D- instead of D+.
*/
/* #ifdef __ASSEMBLER__
* macro myAssemblerMacro
* in YL, TCNT0
* sts timer0Snapshot, YL
* endm
* #endif
* #define USB_SOF_HOOK myAssemblerMacro
* This macro (if defined) is executed in the assembler module when a
* Start Of Frame condition is detected. It is recommended to define it to
* the name of an assembler macro which is defined here as well so that more
* than one assembler instruction can be used. The macro may use the register
* YL and modify SREG. If it lasts longer than a couple of cycles, USB messages
* immediately after an SOF pulse may be lost and must be retried by the host.
* What can you do with this hook? Since the SOF signal occurs exactly every
* 1 ms (unless the host is in sleep mode), you can use it to tune OSCCAL in
* designs running on the internal RC oscillator.
* Please note that Start Of Frame detection works only if D- is wired to the
* interrupt, not D+. THIS IS DIFFERENT THAN MOST EXAMPLES!
*/
#define USB_CFG_CHECK_DATA_TOGGLING 0
/* define this macro to 1 if you want to filter out duplicate data packets
* sent by the host. Duplicates occur only as a consequence of communication
* errors, when the host does not receive an ACK. Please note that you need to
* implement the filtering yourself in usbFunctionWriteOut() and
* usbFunctionWrite(). Use the global usbCurrentDataToken and a static variable
* for each control- and out-endpoint to check for duplicate packets.
*/
#define USB_CFG_HAVE_MEASURE_FRAME_LENGTH 0
/* define this macro to 1 if you want the function usbMeasureFrameLength()
* compiled in. This function can be used to calibrate the AVR's RC oscillator.
*/
#define USB_USE_FAST_CRC 0
/* The assembler module has two implementations for the CRC algorithm. One is
* faster, the other is smaller. This CRC routine is only used for transmitted
* messages where timing is not critical. The faster routine needs 31 cycles
* per byte while the smaller one needs 61 to 69 cycles. The faster routine
* may be worth the 32 bytes bigger code size if you transmit lots of data and
* run the AVR close to its limit.
*/
/* -------------------------- Device Description --------------------------- */
#define USB_CFG_VENDOR_ID 0xc0, 0x16 /* = 0x16c0 = 5824 = voti.nl */
/* USB vendor ID for the device, low byte first. If you have registered your
* own Vendor ID, define it here. Otherwise you may use one of obdev's free
* shared VID/PID pairs. Be sure to read USB-IDs-for-free.txt for rules!
* *** IMPORTANT NOTE ***
* This template uses obdev's shared VID/PID pair for Vendor Class devices
* with libusb: 0x16c0/0x5dc. Use this VID/PID pair ONLY if you understand
* the implications!
*/
#define USB_CFG_DEVICE_ID 0xe8, 0x03 /* VOTI's lab use PID */
/* This is the ID of the product, low byte first. It is interpreted in the
* scope of the vendor ID. If you have registered your own VID with usb.org
* or if you have licensed a PID from somebody else, define it here. Otherwise
* you may use one of obdev's free shared VID/PID pairs. See the file
* USB-IDs-for-free.txt for details!
* *** IMPORTANT NOTE ***
* This template uses obdev's shared VID/PID pair for Vendor Class devices
* with libusb: 0x16c0/0x5dc. Use this VID/PID pair ONLY if you understand
* the implications!
*/
#define USB_CFG_DEVICE_VERSION 0x00, 0x01
/* Version number of the device: Minor number first, then major number.
*/
#define USB_CFG_VENDOR_NAME 'c', 'o', 'd', 'e', 'a', 'n', 'd', 'l', \
'i', 'f', 'e', '.', 'c', 'o', 'm'
#define USB_CFG_VENDOR_NAME_LEN 15
/* These two values define the vendor name returned by the USB device. The name
* must be given as a list of characters under single quotes. The characters
* are interpreted as Unicode (UTF-16) entities.
* If you don't want a vendor name string, undefine these macros.
* ALWAYS define a vendor name containing your Internet domain name if you use
* obdev's free shared VID/PID pair. See the file USB-IDs-for-free.txt for
* details.
*/
#define USB_CFG_DEVICE_NAME 'M', 'o', 'u', 's', 'e'
#define USB_CFG_DEVICE_NAME_LEN 5
/* Same as above for the device name. If you don't want a device name, undefine
* the macros. See the file USB-IDs-for-free.txt before you assign a name if
* you use a shared VID/PID.
*/
/*#define USB_CFG_SERIAL_NUMBER 'N', 'o', 'n', 'e' */
/*#define USB_CFG_SERIAL_NUMBER_LEN 0 */
/* Same as above for the serial number. If you don't want a serial number,
* undefine the macros.
* It may be useful to provide the serial number through other means than at
* compile time. See the section about descriptor properties below for how
* to fine tune control over USB descriptors such as the string descriptor
* for the serial number.
*/
#define USB_CFG_DEVICE_CLASS 0 /* set to 0 if deferred to interface */
#define USB_CFG_DEVICE_SUBCLASS 0
/* See USB specification if you want to conform to an existing device class.
* Class 0xff is "vendor specific".
*/
#define USB_CFG_INTERFACE_CLASS 3 /* define class here if not at device level */
#define USB_CFG_INTERFACE_SUBCLASS 0
#define USB_CFG_INTERFACE_PROTOCOL 0
/* See USB specification if you want to conform to an existing device class or
* protocol. The following classes must be set at interface level:
* HID class is 3, no subclass and protocol required (but may be useful!)
* CDC class is 2, use subclass 2 and protocol 1 for ACM
*/
#define USB_CFG_HID_REPORT_DESCRIPTOR_LENGTH 52
/* Define this to the length of the HID report descriptor, if you implement
* an HID device. Otherwise don't define it or define it to 0.
* If you use this define, you must add a PROGMEM character array named
* "usbHidReportDescriptor" to your code which contains the report descriptor.
* Don't forget to keep the array and this define in sync!
*/
/* #define USB_PUBLIC static */
/* Use the define above if you #include usbdrv.c instead of linking against it.
* This technique saves a couple of bytes in flash memory.
*/
/* ------------------- Fine Control over USB Descriptors ------------------- */
/* If you don't want to use the driver's default USB descriptors, you can
* provide our own. These can be provided as (1) fixed length static data in
* flash memory, (2) fixed length static data in RAM or (3) dynamically at
* runtime in the function usbFunctionDescriptor(). See usbdrv.h for more
* information about this function.
* Descriptor handling is configured through the descriptor's properties. If
* no properties are defined or if they are 0, the default descriptor is used.
* Possible properties are:
* + USB_PROP_IS_DYNAMIC: The data for the descriptor should be fetched
* at runtime via usbFunctionDescriptor(). If the usbMsgPtr mechanism is
* used, the data is in FLASH by default. Add property USB_PROP_IS_RAM if
* you want RAM pointers.
* + USB_PROP_IS_RAM: The data returned by usbFunctionDescriptor() or found
* in static memory is in RAM, not in flash memory.
* + USB_PROP_LENGTH(len): If the data is in static memory (RAM or flash),
* the driver must know the descriptor's length. The descriptor itself is
* found at the address of a well known identifier (see below).
* List of static descriptor names (must be declared PROGMEM if in flash):
* char usbDescriptorDevice[];
* char usbDescriptorConfiguration[];
* char usbDescriptorHidReport[];
* char usbDescriptorString0[];
* int usbDescriptorStringVendor[];
* int usbDescriptorStringDevice[];
* int usbDescriptorStringSerialNumber[];
* Other descriptors can't be provided statically, they must be provided
* dynamically at runtime.
*
* Descriptor properties are or-ed or added together, e.g.:
* #define USB_CFG_DESCR_PROPS_DEVICE (USB_PROP_IS_RAM | USB_PROP_LENGTH(18))
*
* The following descriptors are defined:
* USB_CFG_DESCR_PROPS_DEVICE
* USB_CFG_DESCR_PROPS_CONFIGURATION
* USB_CFG_DESCR_PROPS_STRINGS
* USB_CFG_DESCR_PROPS_STRING_0
* USB_CFG_DESCR_PROPS_STRING_VENDOR
* USB_CFG_DESCR_PROPS_STRING_PRODUCT
* USB_CFG_DESCR_PROPS_STRING_SERIAL_NUMBER
* USB_CFG_DESCR_PROPS_HID
* USB_CFG_DESCR_PROPS_HID_REPORT
* USB_CFG_DESCR_PROPS_UNKNOWN (for all descriptors not handled by the driver)
*
* Note about string descriptors: String descriptors are not just strings, they
* are Unicode strings prefixed with a 2 byte header. Example:
* int serialNumberDescriptor[] = {
* USB_STRING_DESCRIPTOR_HEADER(6),
* 'S', 'e', 'r', 'i', 'a', 'l'
* };
*/
#define USB_CFG_DESCR_PROPS_DEVICE 0
#define USB_CFG_DESCR_PROPS_CONFIGURATION 0
#define USB_CFG_DESCR_PROPS_STRINGS 0
#define USB_CFG_DESCR_PROPS_STRING_0 0
#define USB_CFG_DESCR_PROPS_STRING_VENDOR 0
#define USB_CFG_DESCR_PROPS_STRING_PRODUCT 0
#define USB_CFG_DESCR_PROPS_STRING_SERIAL_NUMBER 0
#define USB_CFG_DESCR_PROPS_HID 0
#define USB_CFG_DESCR_PROPS_HID_REPORT 0
#define USB_CFG_DESCR_PROPS_UNKNOWN 0
/* ----------------------- Optional MCU Description ------------------------ */
/* The following configurations have working defaults in usbdrv.h. You
* usually don't need to set them explicitly. Only if you want to run
* the driver on a device which is not yet supported or with a compiler
* which is not fully supported (such as IAR C) or if you use a differnt
* interrupt than INT0, you may have to define some of these.
*/
/* #define USB_INTR_CFG MCUCR */
/* #define USB_INTR_CFG_SET ((1 << ISC00) | (1 << ISC01)) */
/* #define USB_INTR_CFG_CLR 0 */
/* #define USB_INTR_ENABLE GIMSK */
/* #define USB_INTR_ENABLE_BIT INT0 */
/* #define USB_INTR_PENDING GIFR */
/* #define USB_INTR_PENDING_BIT INTF0 */
/* #define USB_INTR_VECTOR INT0_vect */
#endif /* __usbconfig_h_included__ */
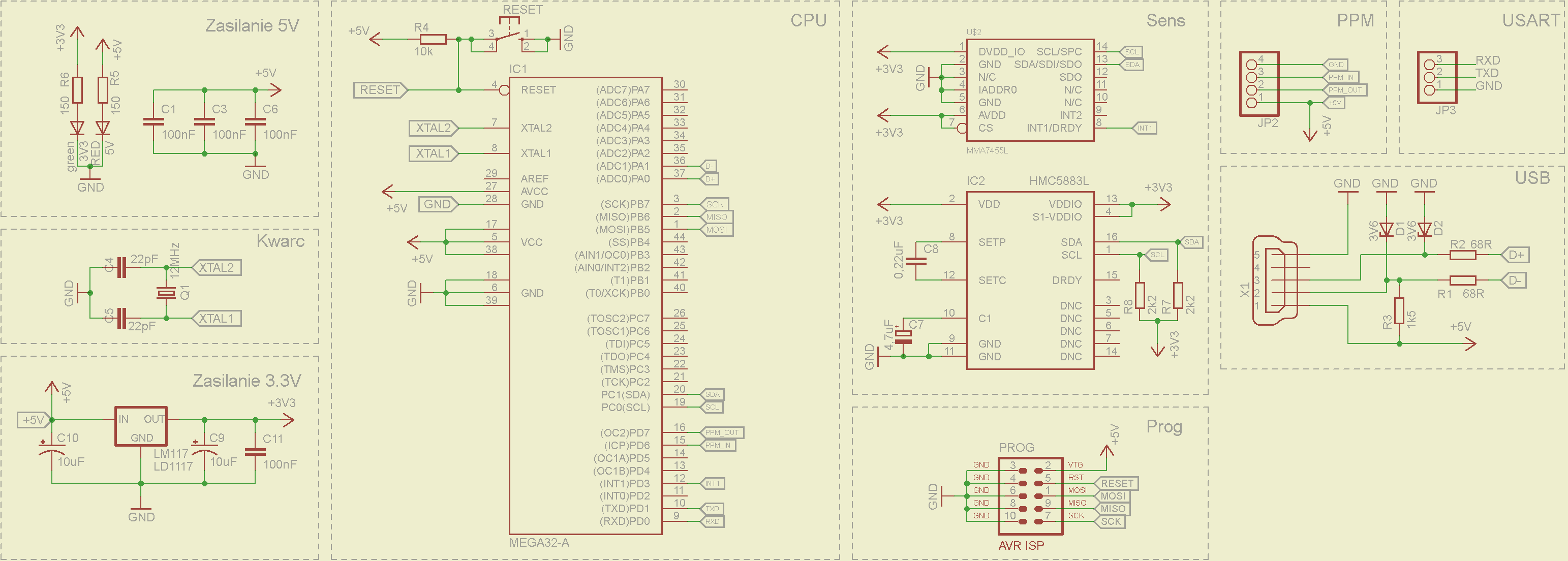
Schematic